<자율주행자동차의 발전>
‘자율주행자동차 4: 자율주행자동차의 역사 (1) 포스팅에 이어집니다.
미국에서는 국방고등연구계획국(DARPA)의 ‘ALV(Autonomous Land Vehicle)’ 프로젝트의 일환으로 여러 대학 및 연구소의 자율주행 연구를 지원하여 새롭고 다양한 기술의 발전을 이루었습니다.
앞서 로봇 역사 포스팅에서 설명한 스탠퍼드 연구소(SRI)의 첫 번째 자율 이동식 로봇 ‘쉐이키(Shakey)’도 이 프로젝트의 지원으로 이루어졌으며, 이 시기에 컴퓨터와 라이더(LiDar)를 사용하여 자율 주행하는 기술에 대한 발전이 크게 이루어졌는데, HRL(Hughes Research Laboratories)은 오프로드맵과 센서 기반의 길 찾기 기능을 하였습니다.
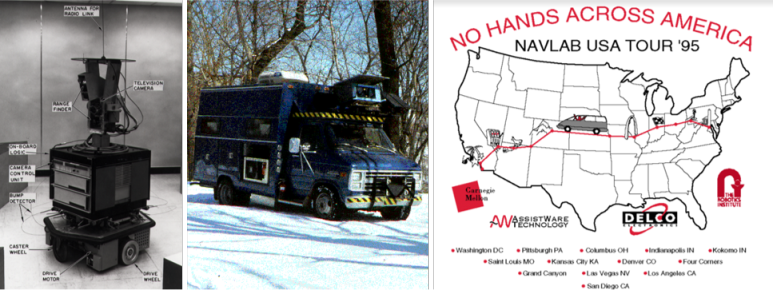
역시 ALV 프로젝트의 지원을 받은 미국 자율주행차 연구의 선구자인 카네기멜론 대학(CMU)의 ‘나브랩(Navlab)’도 1984년에 자율주행에 관한 연구를 시작했습니다.
1986년에 제 블랙은 트럭을 개조해서 자율주행시스템을 탑재했는데 사람이 직접 탔는데 자율주행모드로 주행을 시연했어요. 시속 30km 정도로 늦었지만 당시의 컴퓨팅 성능 상황을 생각하면 상당한 기술이라고 할 수 있습니다.
제 블랙은 1995년에 ‘손 안 대고 미국 횡단(No Hands Across America)’ 프로젝트를 진행하여 피츠버그에서 샌디에이고까지 총 거리 4,585km 중 98.2%의 거리를 자율주행으로 달리는 데 성공했습니다. 이때 사용된 차량은 비디오 이미지를 이용하여 전방 도로의 상태, 차량을 확인하고 신경망 기술로 차선을 유지하기 위한 조향 기능을 자동 제어 하였으나 가속과 제동은 운전자가 인수하여 제어하여 현재의 ‘레벨 1’ 수준의 자율주행에 성공하였습니다[i].

“< 쉐이키, 네브랩 1 손없이 미국 횡단 티셔츠 그림, 출처 : Wikipedia, Pittsbough Robotics Network > 대전 엑스포가 있었던 1993년에는 한국에서도 자율주행 자동차의 도심 구간 주행 시연이 있었습니다” 당시 고려대 산업공학과 한민홍 교수가 아시아자동차의 ‘락스타’를 개조해 만든 자율주행차는 차선변경 기술을 적용받지 못했지만, 카메라를 통해 영상을 수집, 분석하여 앞차와의 거리를 유지하는 방법으로 서울 시내 약 17㎞ 구간을 자율주행하는데 성공하였습니다.
자체 기술로 개발된 이 차량과 기술은 1995년 서울에서 부산까지 경부고속도로를 달렸으나 이후 정부의 과제 신청에 실패해 공식적인 진전이 없었습니다. 한민홍 교수는 계속 개량해나가면서 1998년에는 마티즈를 개량한 다섯 번째 자율주행차 KAV-5(Korea Autonomous Vehicle-5)를 선보였는데 자율차 상용화보다는 ‘주변 상황 감지 및 알람 기능’, ‘스톱 앤 고(Stop & Go) 기능 등의 실용화 방향을 잡은 것 같습니다.

<고려대 공과 대학에 전시된 항밍홍 교수의 93년도, 자율 주행 자동차, 출처:고려대 박물관>1996년 이탈리아의 파르마 대학교 알베르토 브로 키(Alberto Broggi)는 두대의 저가 흑백 비디오 카메라와 입체 영상 알고리즘 등을 이용하여 일반 고속 도로의 차선을 감지하고 자율 주행하는 “ALGO”프로젝트를 진행했지만 북부 이탈리아에서 6일 동안 1,900Km를 평균 시속 90Km로 주행하는데 성공했습니다. 이 프로젝트는 기존의 일반 도로를 이용하고 자율 주행을 하고 있으므로 도로 조정 등의 추가 비용이 들지 않게 큰 의미가 있었습니다.
2000년대 초반부터 네덜란드에서는 도로 표면에 내장된 일련의 자신의 기준점을 통해서 이동하여 위치를 확인하는 “파크 셔틀(ParkShuttle)”이라는 자율 주행 대중 운송 시스템이 설치되어 운영되기 시작했죠.
같은 시기 미 육군 군사용 무인의 자율 차량을 개발했지만”시위-3(DEMO III)”은 육상 기반 무인 차량에서 자율적으로 불리한 지형과 장애물을 회피하는 기능을 시연하고 특히 군중 주행에서 목표 임무의 지시로 전체 차량의 이동을 자동적으로 제어하는 기능을 선 보이기도 했습니다.
미국의 자율 주행 자동차 역사를 말할 때 빼놓을 수 없는 것이 국방 고등 연구 계획국(DARPA)의 “다 퍼그 랜드 챌린지(The DARPA Grand Challenge)”대회입니다. 국방 고등 연구 계획국은 ALV프로젝트 및 다양한 프로젝트를 통해서 자율 주행 기술 개발에 막대한 투자를 해왔으나 이런 기술 개발에 대한 투자는 육군 장비를 무인화할 목적이었습니다.
그러한 프로젝트의 일환으로 국방 고등 연구 계획국은 2004년부터 세계 최초의 장거리 무인, 자율 주행 자동차 대회인 다 퍼그 랜드 도전을 개최했습니다.
2004년 3월에 열린 첫 대회는 자율 성주 이상 차로에 모하비 사막 지역에서 240Km의 코스를 10시간 이내에 횡단하는 팀에게 백만달러의 상금 수여하기로 했는데 완주에 성공한 팀이 없었습니다.
2005年の二番目の大会では出場した23チーム中5台の車が完走したが、スタンフォード大学とフォルクスワーゲンなどが連合した”スタンフォードレーシング”チームが6時間54分の記録で優勝しました。
이때 스탠퍼드 대학 팀을 이끈 사람이 “자율 주행 자동차의 아버지”로 불리는 세바스챤 Sebastian Thrun)박사입니다. 박사는 그 후에 구글의 비밀 연구소인 “구글 X”의 초대 연구소장과 자율 주행 자동차 연구를 주도하면서 2012년에는 온라인 교육 기관인 “유다 시티(Udacity)”을 공동 설립하기도 했습니다.
세번째 대회는 2007년에 개최되었지만, 사막이 아닌 도시 환경의 구간에서 교통 규칙을 준수하고 합류하는 다른 차량 안에서 주행해야 하는 대회여서 대회의 부제도 “어번 챌린지(Urban Challenge)”였습니다. 이 대회에서는 두번째 대회에서 2위와 3위를 차지한 카네기 멜론 대학 팀이 우승하고 스탠퍼드 대학 팀이 2위를 획득했습니다.
이 세번째 대회에서 3위를 한 팀은 한국에 로봇 박사가 이름이 알려진 UCLA의 데니스 홍 박사가 버지니아 테크 대학교 기계 공학과 교수로 있을 때 참가했다”빅토르 탱고(VictorTango)”팀이었어요. 데니스 홍 박사와 버지니아 텍 팀은 출전 차량을 개량하고 2009년에는 시각 장애자가 운전할 수 있는 차량을 개발하고 선 보이기도 했습니다.

<다퍼그랜드 챌린지 20 07에서 스탠퍼드팀 차 “Stanley”(파랑)와 버지니아텍 대학팀 차 “Victor Tango”(회색)가 교차로에서 만난 장면, 출처 : Wikipedia>
2009년 구글이 자율주행자동차 연구에 착수한다고 발표하고, 도요타 프리우스에 각종 레이더와 센서를 장착하고 구글 자율주행차 소프트웨어 ‘구글 쇼퍼(Goolge Chauffeur)’를 탑재한 최초의 구글카로 등장한 이래 2010년대는 자율주행차 연구 및 개발의 전성시대로 발전해 기존 상용차 기업은 물론 IT 기업까지 자율주행차 개발에 뛰어들어 큰 힘을 실어준 것이다.
< 구글의 2009년 자율주행 차량 출처 : Waymo Web > 2010년 독일 브라운슈바이크기술대학 제어공학연구소는 독일 도로에서 자율주행면허를 최초로 취득한 자율주행자동차 “레오니에(Leonie)”를 발표하고 공공도로에서 주행을 시연하였습니다.
2011년 미국 네바다에서는 자율주행자동차 운행에 관한 법률을 통과시켜 2012년 구글 무인자동차가 운전면허를 취득하고 시험운행을 시작했는데 이것이 미국에서 발행된 최초의 자율주행자동차 면허였습니다.
2014년 첫 상업용 무인차 판매가 시작되었으며, 인덕트 테크놀로지의 ‘나비아(Navia)’로 골프 카트와 유사한 형태의 8인승 차량으로 주행속도는 시속 20Km 정도로 산업단지, 공항, 테마파크 등 제한된 구역의 셔틀용이었습니다.
같은 해 애플이 자율주행차 사업인 ‘타이탄 프로젝트’를 비밀리에 추진하고, 같은 해 말에는 구글의 프로토타입 자율주행차가 등장하는데, 생쥐와 비슷한 외모로 주목을 받아 실내에는 시트와 비상용 정차 버튼 외에 아무것도 장착돼 있지 않았지만 구글은 2016년에 자율주행자동차 사업부를 웨이모(Waymo)라는 다른 회사로 분사했습니다.

<구글의 2014년 자율주행 자동차 파이어플라이(FireFly), 출처 : Waymo Web>[i] https://www.cs.cmu.edu/~tjochem/nhaa/nhaa_home_page.html